供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0
SINAMICS G120P 通用型变频器
用于泵、风机和压缩机的模块化变频器
概述
-
SINAMICS G120P – 说明
-
SINAMICS G120P – 优点简介
-
SINAMICS G120P – 技术数据
-
SINAMICS G120P – 典型用途
SINAMICS G120P – 说明

适用于楼宇自动化、水处理及过程工业。SINAMICS G120P 变频器是专门针对工业环境以及供暖、通风和空调应用而设计的。它是一种经济、节能和易于操作的变频器,功能广泛,适用于泵、风机和压缩机。作为一个模块化的变频器系统,SINAMICS G120P 由控制单元、电源模块和操作员面板(IOP = 智能型操作员面板;或 BOP-2 基本操作员面板)及盲板组成。通过控制单元,可与本地控制器以及监视设备进行通讯。
功率模块的功率范围为:
IP55: 0.37 kW 至 90 kW
IP20: 0.37 kW 至 75 kW
SINAMICS G120P – 优点简介
-
SINAMICS G120P 具有较高的用户友好性:
集成的应用程序向导和宏便于进行调试
具有使用方便的诊断与维护工具
-
SINAMICS G120P 提供了可提高整个过程链能效的功能:
采用高效变频器拓扑,视在功率消耗较低
变频器效率 >97%
节能模式、休眠模式、绕过模式(用于最佳调节至工作点)等软件功能
-
高效一致的解决方案
通过全集成自动化 (TIA),取得从 SINAMICS 直至自动化级别的一致性
SINAMICS G120P – 技术数据
|
电压和功率范围 |
380 – 480 V ± 10% 三相交流, IP55: 0.37 - 90 kW IP20: 0.37 - 75 kW |
|
控制类型 |
矢量控制,FCC(磁通电流控制),多点特性(可参数化的 V/f 特性),V/f 特性 |
|
防护等级 |
IP55/UL Type 12 IP20/UL Open Type |
SINAMICS G120P – 典型用途
新型 SINAMICS G120P 变频器是供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0通风风机的闭环速度控制、加热和冷却系统的循环泵、增压泵或液位控制泵等应用的理想解决方案。
标签
SINAMICS G120P 泵/风机用变频器,SINAMICS G120P,泵/风机用变频器 SINAMICS
目录
1 概述
2 必备条件
2.1 使用的硬件
2.2 使用的软件
2.3 通信连接
3 通过供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0Modbus通信实现V90内部位置控制的MDI功能
3.1 V90 Modbus 寄存器说明
3.2 V90参数设置
3.3 PLC的编程
1 概述
SINAMICS V90固件版本1.05以上开始,伺服驱动器提供了Modbus RTU 通信功能。PLC可以通过 Modbus 的FC3及FC6功能代码读取或写入伺服驱动的寄存器,S7-200 Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。本文详细描述了S-200 SMART PLC 通过Modbus RTU 通信连接SINAMICS V90实现内部位置的MDI功能。
2 必备条件
2.1 使用的硬件
使用的硬件如表2-1所示。
|
序号 |
设备名称 |
订货号 |
|
1 |
SIMATIC S7-200 SMART CPU ST60 |
6ES7288-1ST60-0AA0 |
|
2 |
V90驱动器 |
6SL3210-5FE10-4UA0(V1.05版本以上) |
|
3 |
伺服电机 |
1FL6042-1AF61-0LG1 |
|
4 |
电机及编码器配套电缆 |
|
表2-1使用供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0的硬件
2.2 使用的软件
使用的软件如表2-2所示。
|
序号 |
描 述 |
|
1 |
Window 7 旗舰版 32位或64位 |
|
2 |
STEP 7-Micro/WIN SMART 编程软件 |
|
3 |
SINAMICS V-ASSISTANT V1.02 |
表2-2使用的软件
2.3 通信连接
SINAMICS V90 伺服驱动通过 RS485 电缆与 PLC 连接,使用供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0标准 Modbus 通信协议进行通讯。通过Modbus PLC给V90发送伺服使能和停止命令并且可以读取伺服驱动器的状态及故障代码。
SINAMICS V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485(端口 0) 进行通讯,接线如图2-1所示。

图2-1 S7-200 SMART CPU 与V90通讯线连接
3 通过Modbus通信实现V90内部位置控制的MDI功能
3.1 V90 Modbus 寄存器说明
V90内部控制的控制数据寄存器如表3-1所示。
|
寄存器编号 |
描述 |
单位 |
定标系数 |
范围 |
|
40100 |
IPOS控制模式控制字 |
|
|
|
|
40932/40933 |
MDI 速度设定值 |
1000LU/min |
1 |
1至2147482647 |
|
40934 |
MDI 加速度倍率 |
% |
100 |
0.1 至100 |
|
40935 |
MDI 减速度倍率 |
% |
100 |
0.1 至100 |
|
40102 |
位置设定值高字 |
LU |
1 |
-2147482648至 2147482647 |
|
40103 |
位置设定值低字 |
表3-1 V90的内部位置控制数据寄存器
IPOS控制模式寄存器 40100控制字的定义如表3-2所示。
|
位 |
信号 |
描 述 |
|
0 |
SON_OFF1 |
通过供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0上升沿使能伺服,=0时驱动通过斜坡函数发生器停车,脉冲被取消 |
|
1 |
OFF2 |
1:OFF2=1,允许使能 0:OFF2=0,立即取消脉冲 |
|
2 |
OFF3 |
1:OFF3=1,允许使能 0:OFF3=0,快速停车,脉冲被消除 |
|
3 |
OPER |
1:允许运行(脉冲可以被使能) 0:禁止运行(取消脉冲) |
|
4 |
SETP_ACC |
触发上升沿来接收MDI 设定值 |
|
5 |
TRANS_TYPE SE |
1:立即接收新的设定值 0:通过触发上升沿来接收新的设定值 |
|
6 |
POS_TYP |
1:绝对定位 0:相对定位 |
|
7 |
RESET |
复位故障 |
|
8 |
预留 |
|
|
9 |
预留 |
|
|
10 |
PLC |
使能 PLC 的控制权 |
|
11 |
预留 |
|
|
12 |
预留 |
|
|
13 |
SREF |
启动回参考点(对于p29240=0,通过REF 信号回参考点) |
|
14 |
预留 |
|
|
15 |
预留 |
|
表3-2 寄存器 40100控制字的定义
3.2 V90参数设置
按照表3-3设置伺服驱动器的相关参数
|
参数设置 |
说明 |
|
P29003=1 |
P29003为内部控制模式 |
|
P29303[0]=3 |
设置DI3为CWL,正限位,连接限位开关为高电平 |
|
P29304[0]=4 |
设置DI4为CCWL,负限位,连接限位开关为高电平 |
|
P29004=1 |
设置SINAMICS V90 的MODBUS站地址为1 |
|
P29007=2 |
设置通信协议为Modbus 协议 |
|
P29008=1 |
选择 Modbus 控制源,设定值和控制字来自于 Modbus PZD |
|
P29009=8 |
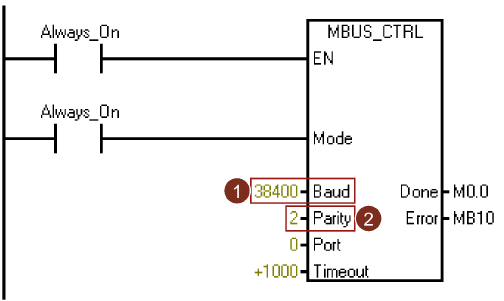
设置传输波特率为38400 波特 |
表3-3伺服驱动器的相关参数
3.3 PLC的编程
PLC的编程如表3-4所示。
|
序号 |
|
|
1 |
初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity = 2)。
|
|
2 |
通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许 PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入 40F)。

|
|
3 |
如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0 |
|
4 |
通过MBUS_MSG功能块,将位置设定值和速度设定值写入寄存器 40932、40933、40934、40935、40102 和40103 中。

|
|
5 |
MDI相对定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F) (2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F) (3) 将表3-1中的寄存器,写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值)后,通过供应原装西门子数控系统800W制动电阻器6SL3100-1BE21-3AA0PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F) |
|
|
MDI绝对定位的40100控制寄存器操作: (1) 在IPos 控制模式中,控制字的位6=1来选择绝对定位模式(44F) (2) MDI设定值的生效有两种: MDI设定值立即生效:控制字的位5=1,设置接收的MDI设定值立即生效(46F); 上升沿来接收MDI 设定值:控制字的位5=0,设置使用上升沿来接收MDI设定值(44F) (3) 将表3-1中的寄存器写入需要的值 (如40934及40935写入十六进制的4000, 40932/40933写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行 |
表3-4 PLC的编程
管理型 SCALANCE X-500 / 第 3 层
灵活组建大型网络
概述
-
描述
-
详细信息
-
优点
描述

选择以 SCALANCE X-500 作为核心组件来构建您的工厂网络。 您可以自主选择连接介质,采用不同的冗余方案将工厂网络接入企业 IT。两种基础设备通过其不同的介质模块(最高可达 10 Gbit/s)提供顶级的网络可用性和未来安全性。
详细信息
-
SCALANCE XR528-6M 带有最多 28 个端口
-
SCALANCE XR552-12M 带有最多 52 个端口
优点
-
全模块化使网络扩展和装配无限灵活
-
全模块化的结构减少了各类设备的库存成本
-
借助 KEY-PLUG 可轻松实现第 3 层功能的加装,无需更换硬件
-
冗余型电源、C-PLUG 可移动存储介质和冗余功能实现较高的可用性
-
注:联系我时,请说是在“傲立机床网”上看到的,谢谢!