主要特性:
-----------------------------------------------------------------------
输出连续扭矩为10~450N.m
适用有效负载小于20公斤以下的协作机器人
额定转速最高可达40RPM,加速度可达10RPS/S
关节输出端重复定位精度高达0.001度
EtherCAT,CANopen通信可选,支持大部分主流机器人控制器
常规为48VDC供电,24~60VDC之间供电可选
结构极其紧凑,最小关节仅为90x128mm,重量<2Kg
安装拆卸简单、快捷
也为客户提供OEM定制化服务
机械传动与电机参数规格:
-----------------------------------------------------------------------
参数
单位
RJS14
RJS17
RJS20
RJS25
RJS32
RJS40
减速器速比
--
101
101
101
101
100
160
减速器背隙
arcmin
10
10
10
10
10
10
转动精度
arcmin
1
1
1
1
1
1
电机极对数
--
6
6
7
6
7
6
电机额定功率
W
117
146
210
350
419
1000
电机额定电压
V
48
48
48
48
48
48
电机额定电流
A
5.7
5.7
7
12
13.3
20
电机额定转速
rpm
3000
3000
3000
2000
2000
2000
电机额定转矩
Nm
0.42
0.5
0.7
1.69
2.0
5
电机转矩常数
Nm/A
0.069
0.124
0.1
0.14
0.163
0.25
反电动势系数
V/krpm
8.3
10
6.26
12
9.85
15.5
关节重量
kg
1.75
2.37
2.92
4.7
7.5
16
关节直径
mm
90
90
100
119
156
184
关节高度
mm
104
104
114
135
172
207
关节长度
mm
130
144
144
160
175
221.1
许用负载转矩
Nm
28
54
82
157
333
279
平均负载转矩
Nm
11
39
49
108
216
450
最大瞬时转矩
Nm
54
86
147
284
647
1000
额定转速
rpm
30
30
30
20
20
12.5
最大转速
rpm
40
35
35
25
25
15
增量编码器
P/R
20000
20000
20000
20000
20000
20000
绝对值编码器
Bit
17/19
17/19
17/19
17/19
17/19
17/19
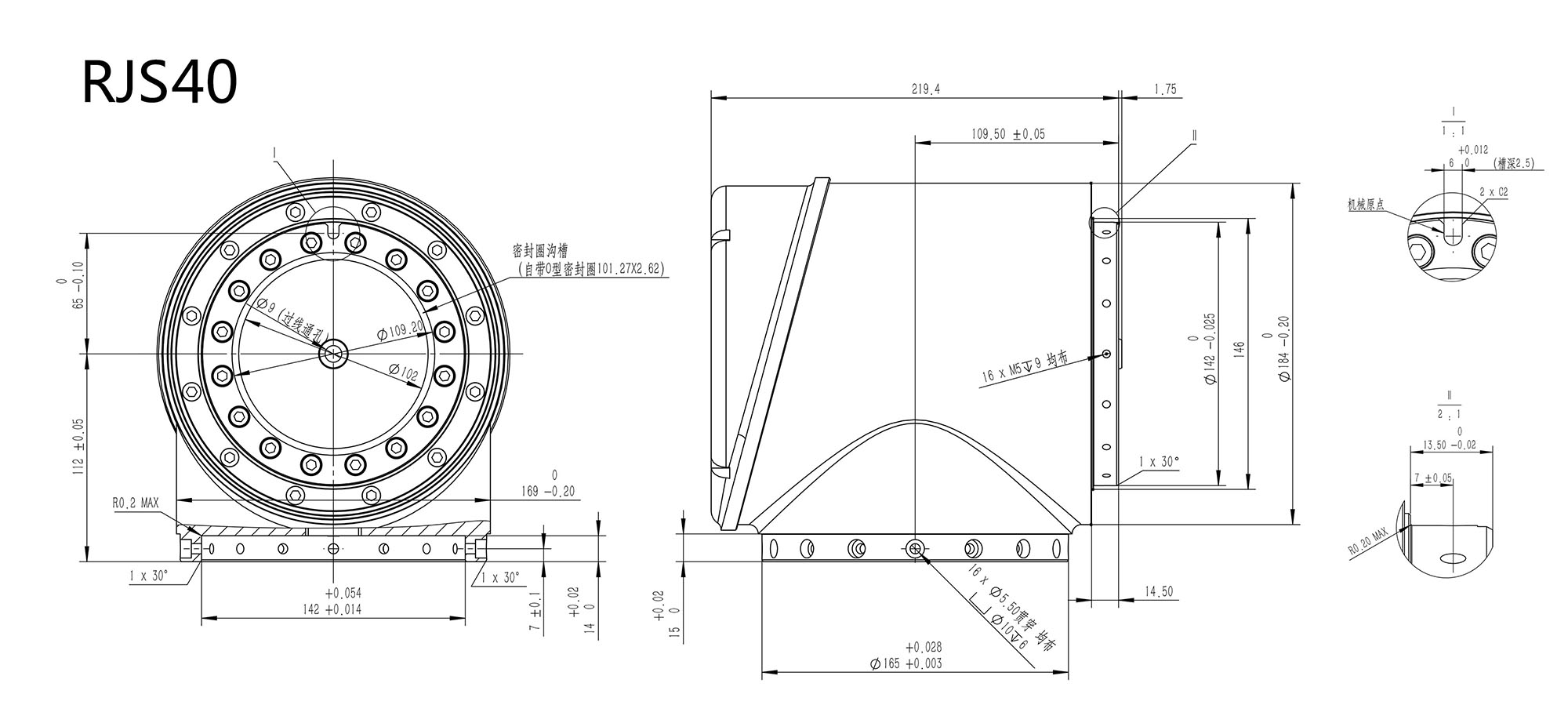
安装尺寸外形图:
-----------------------------------------------------------------------





注:联系我时,请说是在“傲立机床网”上看到的,谢谢!